伴随抽风式焊烟吸气臂
一、使用场合
伴随抽风焊烟吸气臂适用于焊接工位,其利用红外定位控制系统,满足吸气臂跟随工人焊接位置的变化而自动移动。其自动伴随收集焊烟的特性有自动化、智能定位收集、收集效率高、占地位置小的优点。且全自动跟随功能可以让工人不用一直调整集气罩的位置(当焊接较长工件时),提高工作效率。
二、工作原理
伴随抽风焊烟吸气臂由机械移动机构和超宽带设备组成,其可通过超宽带设备确定焊枪位置坐标,进而由机械移动机构将吸气罩口送至焊烟产生点位上方进而收集焊烟。机械移动机构具有移动后可悬停、全自动收集焊烟等特点。
伴随抽风焊烟吸气臂由机械移动机构和超宽带设备组成。机械移动机构分为机械臂、吸气管道两部分,工作时吸气管道通过束带绑定在机械臂上进行移动。超宽带设备用于获取焊烟的位置坐标,发送至电控系统,进而对机械臂作出相应指令。机械臂又分为前臂、中臂、后臂三部分,前臂与中臂及中臂与后臂之间均有一套液压推送机构和扭转连接件,保证机械臂的前后和上下方向上的自由移动能力,后臂与立柱之间有一套旋转连接件,保证吸气臂的左右方向上的自由移动能力。吸气管道为带有钢圈的柔性吸气臂,可实现空中悬停的特点,减小机械臂负担,保证设备运行安全稳定性。
三、设备构成
该吸气臂主体由吸气管道、机械臂和超宽带设备三部分组成。


- 柔性吸气臂 2、连接件一 3、液压缸一 4、液压缸二 5、连接件二 6、后臂 7、连接件三 8、中臂 9、前臂 10、束带 11、吸气罩口
Ⅰ、吸气管道 Ⅱ、机械臂
伴随抽风焊烟吸气臂具有自动定位焊枪位置进而收集焊烟的能力,其由机械移动机构和超宽带设备组成,当本产品进行焊接工作,超宽带设备获取焊烟位置坐标后对机械臂作出相应指令将吸气罩口移动到焊烟上方位置,在主管道后端风机的作用下,产生的焊烟由万向吸气臂罩口进入到万向吸气臂管道中,再由吸气臂管道传输到后端主管。机械移动机构由吸气管道及机械臂组成,机械臂通过前臂与中臂和中臂与后臂之间的液压缸实现前后和上下方向上的移动,通过后臂和立柱的连接件实现左右方向上的移动。
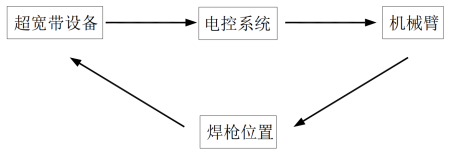
超宽带设备由信号基站和信号源组成,信号基站安置在工厂内固定位置,信号源固定在焊枪上,当焊枪移动时信号源会将焊枪相对于基站的距离及方向发送到信号基站,信号基站收到位置坐标后发送给电控系统,由电控系统对机械臂做出指令将吸气罩口移动到焊接位置上方。吸气管道选用带有钢圈的柔性吸气臂,可实现空中悬停的特点,减小机械臂负担,保证设备运行安全稳定性。
四、设备创新点及优点
1. 全自动化。实现收集焊烟全自动化,由电控系统的程序控制机械臂的移动,智能便捷。
2. 覆盖范围广。凭借机械臂之间的气动缸的运动,吸气罩口可在其工作区域内到达任一点位,实现区域内的全方位覆盖。
3. 自锁性能好。可在工作范围内的任意位置自主悬停且定位准确、无晃动不下垂。
4. 安全系数高。机械臂主体采用钢结构制成,结实耐用,吸气管道采用带钢圈支撑的柔性吸气臂,可自主悬停,减小机械臂负担,增加安全性能。
5. 整齐且美观。工作时,由于吸气管道悬挂在连接在立柱的机械臂上,可保持地面整体清洁;工作结束后,可将吸气臂对折停靠到车间立柱一侧,车间整齐、美观。
自动控制系统图